


Page en cours
Le Cyclops Tornado est un OSD avec contrôleur de vol intégré (voir Qu'est-ce qu'un OSD? et Stabilisateur et contrôleur de vol). Par rapport au Cyclops Storm qui intègre déjà le RTH, le Tornado offre la mesure de la vitesse air par sonde Pitot et une navigation par waypoints.
Description du Cyclops Tornado
Le Cyclops est en fait un OSD avec contrôleur de vol prévu pour le vol en immersion en avion. Il possède aussi un mode "Waypoints - Autopilot" dont je parlerai ultérieurement.
Quelques unes de ses caractéristiques :
-
Poids : 88g
-
Dimensions : 75.3 x 44 x 15 mm
-
Fréquence antenne GPS : 10hz
-
Tension d'utilisation : Lipo 3S (12v) (Ne pas dépasser la tension d'entrée au rique de détériorer l'appareil)
-
Capteur courent : 100A (Tension max d'entrée 30V)
-
Format vidéo : PAL ou NTSC
Contenu du kit :
- 1 Cyclops Tornado osd
- 1 Current sensor 100A ( capteur de tensions)
- 1 GPS 10Hz
- 1 plaquette 3 boutons pour les réglages osd
- Tous les câble nécessaire aux connections
Manuel d'utilisation du Cyclops (in english)
Vous pouvez le trouver en France chez Intermodel. A l'époque, j'avais acheté le mien chez Foxtech.
Plusieurs fils de discussion lui sont consacrés :
- Cyclops Tornado OSD
- Discussion Cyclops Tornado OSD
- Modelisme.com - Cyclops Tornado (même Fred Van H s'y est mis !)
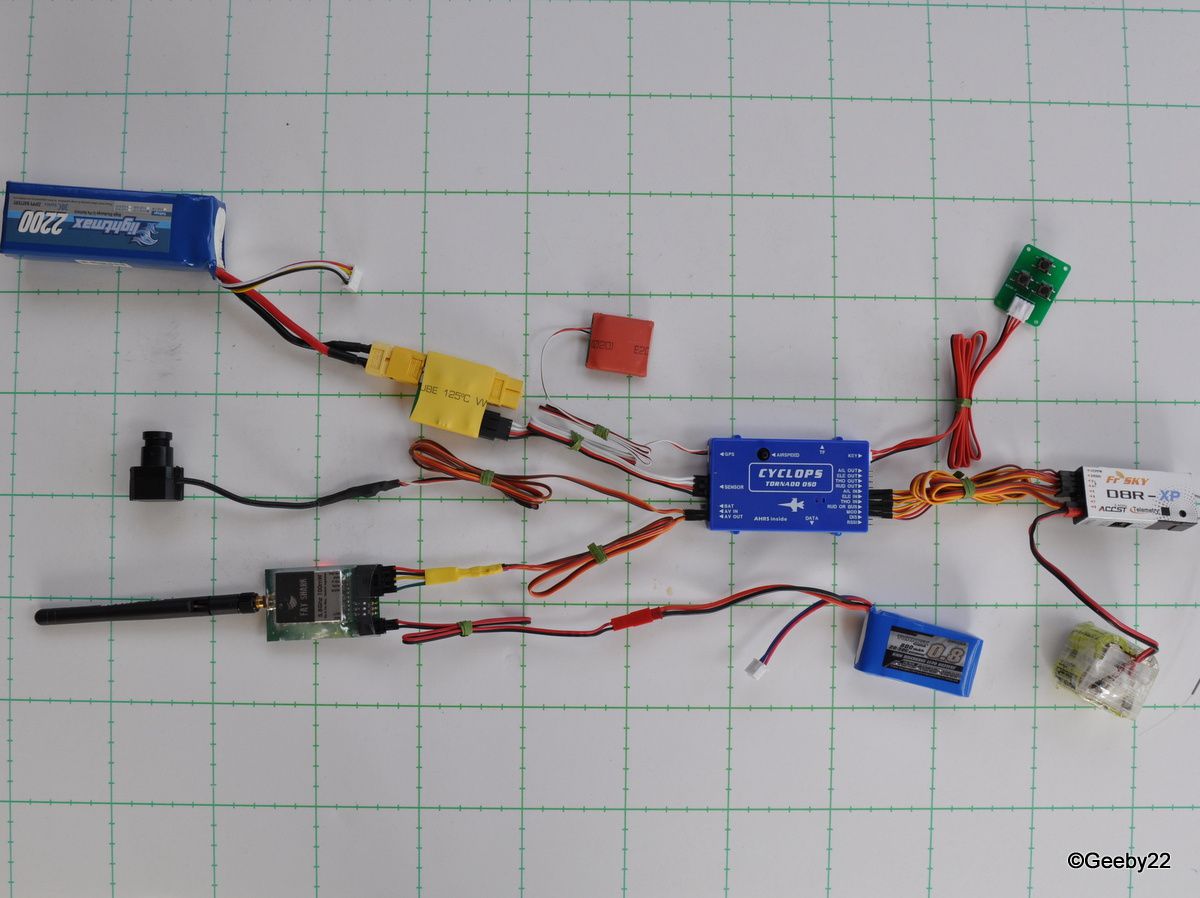
Dans un premier temps, j'ai réalisé un montage sur table afin de bien vérifier tous les éléments. A terme je vais alimenter l'émetteur AV par le Cyclops (12V).
Le mode est commandé par la voie n°7 du Rx FrSky. La sortie Tho Out (Throttle Out) est reliée à l'ESC.
Montage du Cyclops
Et ci-dessous, le résultat sur un écran avec les cas de fonctionnements suivants :
- Mode normal (pas de contrôle - les cdes sont transmises en direct aux servos)
- Mode PA (le contrôleur maintient le cap et l'altitude dès que vous relâchez les sticks)
- Mode RTH (le contrôleur pilote le retour au point de lancement, ce mode peut aussi être activé automatiquement en cas de perte de signal à condition d'avoir activé le Fail-Safe dans ce mode)

Mode normal

Mode PA

Mode RTH
Intégration dans le Bipim
Je vous ai déjà parlé de l'OSD Cyclops Tornado qui incorpore un pilote automatique avec le RTH et un pilotage par Waypoints.
C'est le Bipim d'Intermodel qui va me servir de plateforme FPV pour sa mise au point avec maTaranis FrSky.
Le Tornado est logé sous les ailes du Bipim sur une petite plateforme en ctp au-dessus de l'ESC.

L'antenne GPS et l'émetteur Vidéo sont fixés sur l'aile centrale du Bipim qui est rarement démontée. Le récepteur de télécommande est au-dessus du module OSD-Contrôleur de vol (Il y a de nombreux câbles entre les deux).

GPS, émetteur vidéo et Rx FrSky
Avant de poser l'aile centrale, il faut disposer les câbles, les antennes du Rx, la caméra et le tube Pitot qui permet de mesurer la vitesse air.
Une fois l'aile mise en place, on peut commencer les premiers essais sur table. Une précaution nécessaire : démonter l'hélice ! En effet lors des phases de vol en PA et RTH le moteur se met en marche...

Recommandations :
1- Installation
- Se mettre en capacité de recevoir les satellites GPS (sinon le contrôleur ne répond pas)
- Mettre sous tension votre réception vidéo
- Mettre votre émetteur télécommande sous tension, gaz à zéro et manches aux neutres
- Brancher la batterie au Sensor (la vidéo doit être visible sur votre écran), puis le Sensor à l'ESC (sinon pb d'initialisation de l'ESC - les manches doivent activer les servos)
2- Configuration du Tornado (appuyer simultanément sur Up et Down) :
(Voir la Notice du Cyclops Tornado ci-dessous)
- Régler la capacité de la batterie en mAh
- Initialiser le sensor alim (Reset current)
- Initialisation du centrage des servos (servos center)
- Passer directement à l'initialisation de la sonde de Pitot (Reset Airspeed)
- Régler les vitesses : vitesse de croisière (40 km/h), vitesse max (70 km/h), vitesse min (décrochage + marge : 25 km/h)
- Régler la tension min déclenchant le RTH (Low power RTH : 11 V pour les essais*)
- Régler la limite de vol en mode PA (PA safe range : 400 m pour les essais*)
* Ces valeurs seront ajustées ultérieurement.
3- Test des modes avec la télécommande1 :
- Manuel : 0%
- PA : 33%
- Waypoints : 66%
- RTH : 100%
(1) En fait, sur la Taranis, j'ai programmé plusieurs phases de vol, dont la phase 1 qui permet de gérer uniquement les modes Manuel, PA et RTH (pas de waypoints dans ce mode).
Avec l'inter à trois positions D et une courbe (0, 33% et 100%) je peux accéder aux trois modes.
4- Test du Failsafe :
- Mettre les manches au neutre et gaz au 1/3 (normalement piloté par RTH)
- Mettre le bouton mode sur RTH
- Programmer le Failsafe sur le Rx (voir la notice propre au Rx - sur le FrSky appui bref sur le bouton reset du Rx)
- Repasser en mode Manuel
- Vérifier qu'en coupant la télécommande, le Tornado passe automatiquement en mode RTH avec un régime moteur de croisière
3- Test des modes avec la télécommande1 :

Vérifications du sens des débattements :
- En mode manuel, c'est vous qui pilotez en direct, vérifier que les gouvernes sont au neutre.
- En mode PA, pencher l'avion sur le côté droit et vérifier que les ailerons corrigent correctement pour ramener l'avion en position horizontale (aileron gauche se lève et aileron droit s'abaisse)
- Toujours en mode PA, en penchant le nez de l'avion vers le bas, vérifier que la profondeur se lève pour corriger l'assiette de l'avion...
Si tout est correct, on est prêt pour un premier vol à vue uniquement...
J'ai passé le Bipim + Tornado sur ma Taranis.
Voici l'écran des mixages, avec un petit mix dérive vers ailerons.
Pour la commande de mode du Tornado (Ch7) j'utilise deux FlightModes et un inter 3 positions (SD) et deux courbes :
- La première pour les modes Manuel-PA-RTH en FlightMode1
- La deuxième pour les modes Manuel-Waypoints-RTH en FlightMode2
J'ai préféré une commande par inter plutôt que par un potentiomètre.

Les mixages

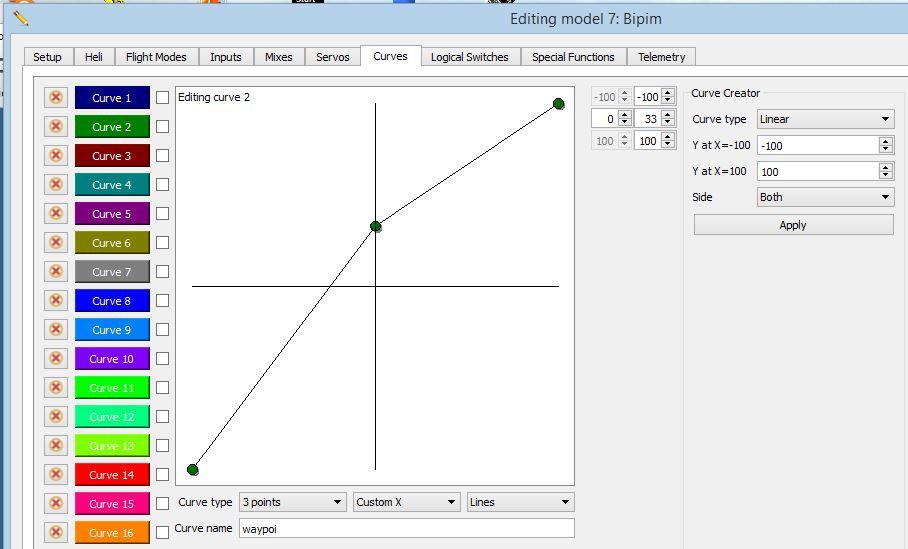
Les deux courbes
Ci-dessous les fonctions programmées (elles ne sont pas toutes utilisées) :

Les fonctions
Et enfin les affichages de télémétrie sur la Taranis :
(je fais des copies de modèle à modèle pour faciliter les choses)



/image%2F0935245%2F20160203%2Fob_98ea6d_geeby22-tweeter.jpg)
/idata%2F1548268%2FAlbum_2013%2FG0010075.JPG)
/idata%2F1548268%2FBalade-en-Anjou%2FBalade-en-Anjou-3663.JPG)
/idata%2F1548268%2F2013-3%2FPAF%2FPAF-2966.JPG)
/idata%2F1548268%2FFou-d-ailes-2%2FFou-d-ailes-2-0348.JPG)
/idata%2F1548268%2FFou-d-ailes%2FFou-d-ailes-0099.JPG)
/idata%2F1548268%2FCholet-2011%2FCholet-2011-5822.JPG)