Quatre jours après la commande, le quadricoptère Quanum Nova est livré via GLS. Le paquet contient une valise en carton :
Valise qui contient d'autres boîtes, dont certaines sont vides dans le cas du PNF :
On trouve ainsi :
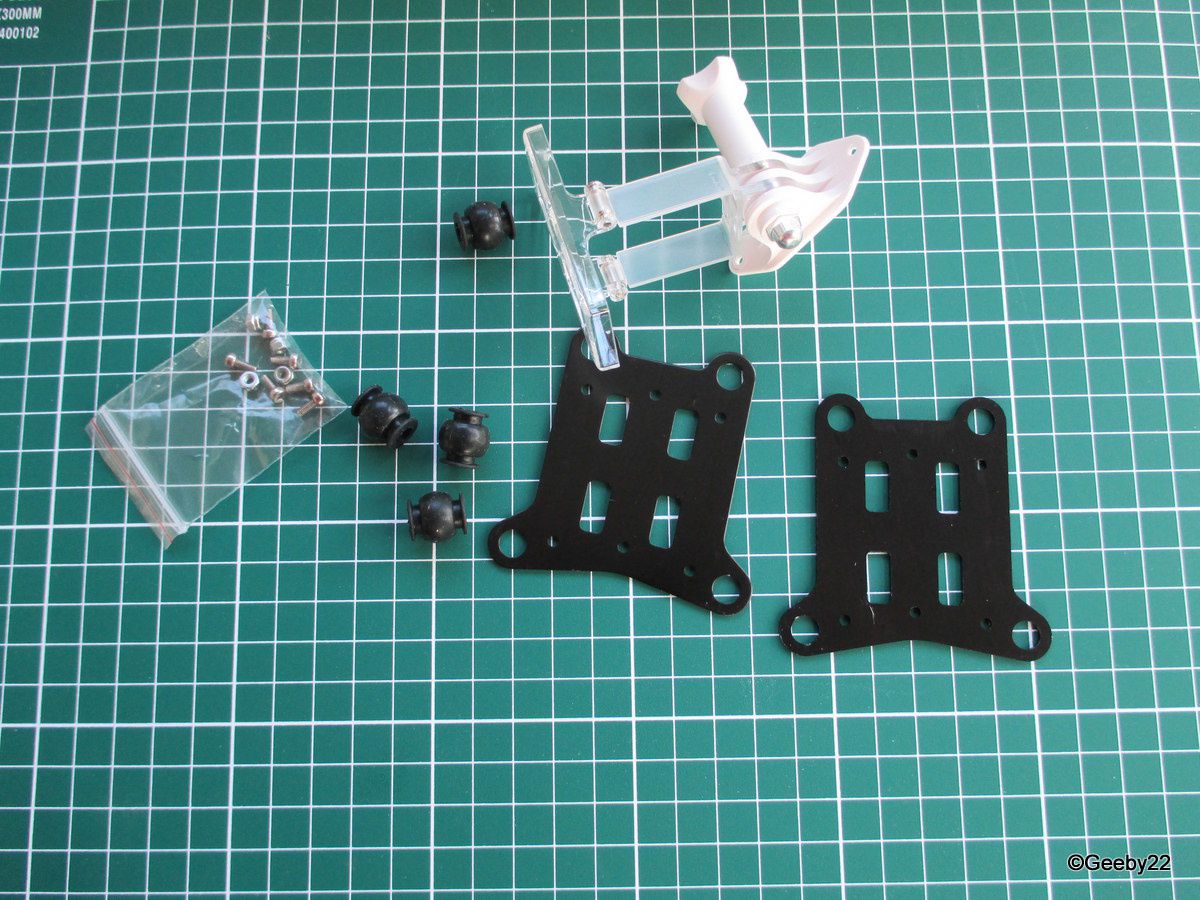
Le support de GoPro
Les outils
Les pieds avec leurs vis de fixation
Les accessoires
Et enfin la bête dans son antre :
En mode PNF, il vous faudra donc ajouter un récepteur "bindé" avec votre propre radio* ainsi que des batteries LiPo 3S 2200 mAh avec des connecteurs XT60.
* Pour ma part j'ai mis un X8R FrSky avec ma Taranis en mode 16 ch.
Le Tornado est logé sous les ailes du Bipim sur une petite plateforme en ctp au-dessus de l'ESC.
L'antenne GPS et l'émetteur Vidéo sont fixés sur l'aile centrale du Bipim qui est rarement démontée. Le récepteur de télécommande est au-dessus du module OSD-Contrôleur de vol (Il y a de nombreux câbles entre les deux).
GPS, émetteur vidéo et Rx FrSky
Avant de poser l'aile centrale, il faut disposer les câbles, les antennes du Rx, la caméra et le tube Pitot qui permet de mesurer la vitesse air.
Une fois l'aile mise en place, on peut commencer les premiers essais sur table. Une précaution nécessaire : démonter l'hélice ! En effet lors des phases de vol en PA et RTH le moteur se met en marche...
Recommandations :
1- Installation
Se mettre en capacité de recevoir les satellites GPS (sinon le contrôleur ne répond pas)
Mettre sous tension votre réception vidéo
Mettre votre émetteur télécommande sous tension, gaz à zéro et manches aux neutres
Brancher la batterie au Sensor (la vidéo doit être visible sur votre écran), puis le Sensor à l'ESC (sinon pb d'initialisation de l'ESC - les manches doivent activer les servos)
2- Configuration du Tornado (appuyer simultanément sur Up et Down) :
Initialisation du centrage des servos (servos center)
Passer directement à l'initialisation de la sonde de Pitot (Reset Airspeed)
Régler les vitesses : vitesse de croisière (40 km/h), vitesse max (70 km/h), vitesse min (décrochage + marge : 25 km/h)
Régler la tension min déclenchant le RTH (Low power RTH : 11 Vpour les essais*)
Régler la limite de vol en mode PA (PA safe range : 400 m pour les essais*)
* Ces valeurs seront ajustées ultérieurement.
3- Test des modes avec la télécommande1 :
Manuel : 0%
PA : 33%
Waypoints : 66%
RTH : 100%
(1) En fait, sur la Taranis, j'ai programmé plusieurs phases de vol, dont la phase 1 qui permet de gérer uniquement les modes Manuel, PA et RTH (pas de waypoints dans ce mode).
Avec l'inter à trois positions D et une courbe (0, 33% et 100%) je peux accéder aux trois modes.
4- Test du Failsafe :
Mettre les manches au neutre et gaz au 1/3 (normalement piloté par RTH)
Mettre le bouton mode sur RTH
Programmer le Failsafe sur le Rx (voir la notice propre au Rx - sur le FrSky appui bref sur le bouton reset du Rx)
Repasser en mode Manuel
Vérifier qu'en coupant la télécommande, le Tornado passe automatiquement en mode RTH avec un régime moteur de croisière
En mode manuel, c'est vous qui pilotez en direct, vérifier que les gouvernes sont au neutre.
En mode PA, pencher l'avion sur le côté droit et vérifier que les ailerons corrigent correctement pour ramener l'avion en position horizontale (aileron gauche se lève et aileron droit s'abaisse)
Toujours en mode PA, en penchant le nez de l'avion vers le bas, vérifier que la profondeur se lève pour corriger l'assiète de l'avion...
Si tout est correct, on est prêt pour un premier vol à vue uniquement...
J'ai enfin pris le temps de m'occuper de mon Cyclops Tornado qui attendait patiement au fond du tiroir.
Le Cyclops est en fait un OSD avec contrôleur de vol (voir l'article Stabilisateurs et contrôleur de vol) prévu pour le vol en immersion. Il possède aussi un mode "Waypoints - Autopilot" dont je parlerai ultérieurement.
Quelques unes de ses caractéristiques :
Poids : 88g
Dimensions : 75.3 x 44 x 15 mm
Fréquence antenne GPS : 10hz
Tension d'utilisation : Lipo 3S (12v) (Ne pas dépasser la tension d'entrée au rique de détériorer l'appareil)
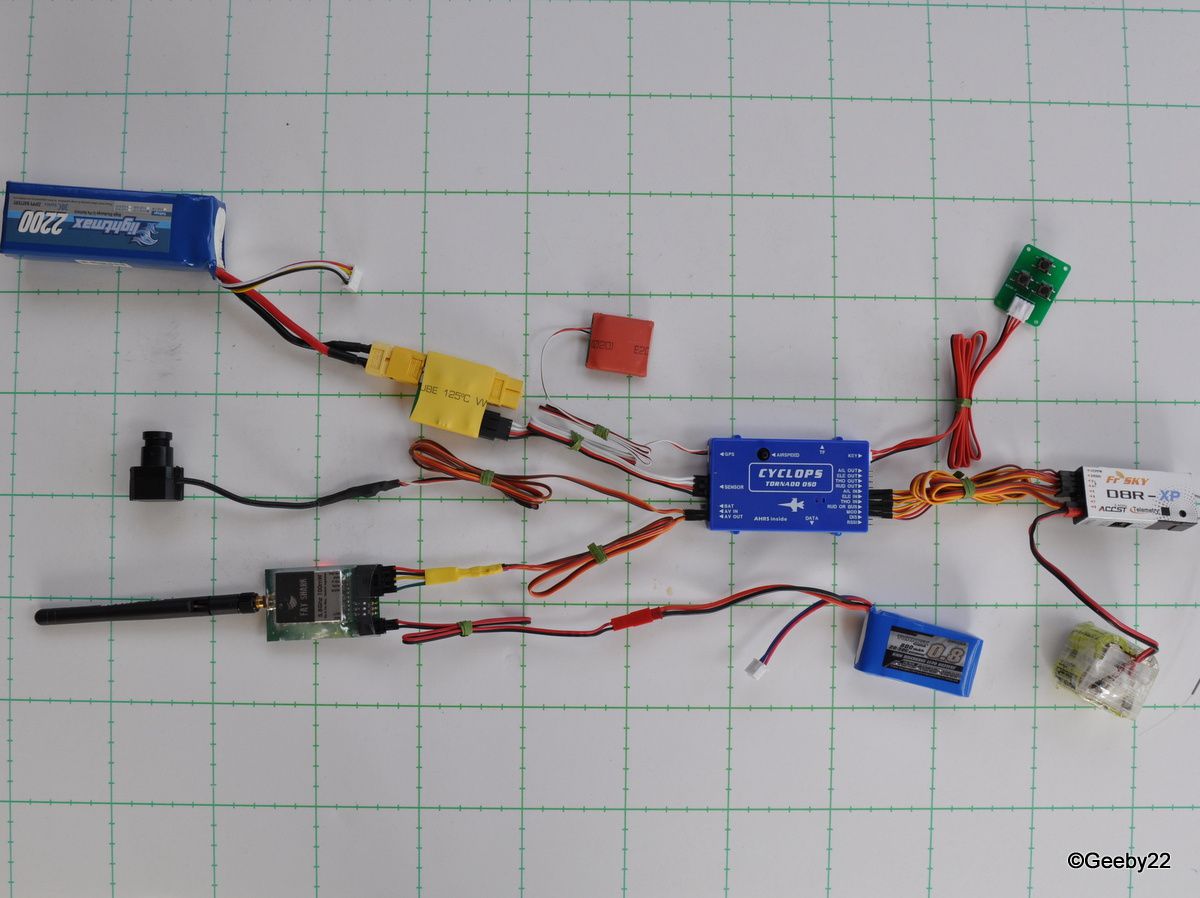
Dans un premier temps, j'ai réalisé un montage sur table afin de bien vérifier tous les éléments. A terme je vais alimenter l'émetteur AV par le Cyclops (12V).
Le mode est commandé par la voie n°7 du Rx FrSky. La sortie Tho Out (Throttle Out) est reliée à l'ESC.
Montage du Cyclops
Et ci-dessous, le résultat sur un écran avec les cas de fonctionnements suivants :
Mode normal (pas de contrôle - les cdes sont transmises en direct aux servos)
Mode PA (le contrôleur maintient le cap et l'altitude dès que vous relâchez les sticks)
Mode RTH (le contrôleur pilote le retour au point de lancement, ce mode peut aussi être activé automatiquement en cas de perte de signal à condition d'avoir activé le Fail-Safe dans ce mode)
L'acronyme OSD signifie On Screen Display, c'est à dire Affichage sur l'écran.
C'est ce que vous utilisez lorsque que vous commandez votre lecteur BluRay ou DVD et que celui-ci affiche son menu sur l'écran de votre téléviseur.
Dans le monde du vol en immersion, c'est un petit équipement embarqué inséré entre la caméra et l'émetteur vidéo qui va permettre d'incruster quelques données qui seront visibles sur l'écran vidéo (ou vos lunettes vidéo). Ces données peuvent être relatives à l'alimentation (courant, tension, consommation...) ou à la géolocalisation fournie par un GPS embarqué.
Ci-contre, une image de vidéo en immersion sur laquelle l'OSD (EzOSD
ImmersionRC) a incrusté les données relatives à la géolocalisation en haut de l'écran et les données relatives à l'alimentation en bas d'écran.
En haut de l'écran sont affichées les données GPS : la vitesse sol, la distance du point de lancement, la direction du point de lancement vue de l'avion et l'altitude GPS (ici, ils'agit de l'altitude relative au point de lancement).
Les données relatives à l'alimentation sont de gauche à droite : la tension de la batterie de propulsion, le courant et la consommation totale.
Ce sont les informations nécessaires au pilote pour gérer son vol. Pas besoin d'encombrer l'écran avec tout un tas d'incrustations qui vous privent d'une belle image sans être nécessaires à votre gestion du vol !
Les données GPS peuvent aussi être insérées dans la voie audio et récupérées en réception pour pointer une antenne directionnelle vers l'avion.
Dans un prochain article je vous parlerai de stabilisateur et contrôleur de vol...






















/image%2F0935245%2F20160203%2Fob_98ea6d_geeby22-tweeter.jpg)
/idata%2F1548268%2FAlbum_2013%2FG0010075.JPG)
/idata%2F1548268%2FBalade-en-Anjou%2FBalade-en-Anjou-3663.JPG)
/idata%2F1548268%2F2013-3%2FPAF%2FPAF-2966.JPG)
/idata%2F1548268%2FFou-d-ailes-2%2FFou-d-ailes-2-0348.JPG)
/idata%2F1548268%2FFou-d-ailes%2FFou-d-ailes-0099.JPG)
/idata%2F1548268%2FCholet-2011%2FCholet-2011-5822.JPG)